

Recent advances in the field of robotics have enabled the automation of various real-world tasks, ranging from the manufacturing or packaging of goods in many industry settings to the precise execution of minimally invasive surgical procedures. Robots could also be helpful for inspecting infrastructure and environments that are hazardous or difficult for humans to access, such as tunnels, dams, pipelines, railways and power plants.


Despite their promise for the safe assessment of real-world environments, currently, most inspections are still carried out by human agents. In recent years, some computer scientists have been trying to develop computational models that can effectively plan the trajectories that robots should follow when inspecting specific environments and ensure that they execute actions that will allow them to complete desired missions.
Researchers at Purdue University and LightSpeed Studios recently introduced a new training-free computational technique for generating inspection plans based on written descriptions, which could guide the movements of robots as they inspect specific environments. Their proposed approach, outlined in a paper published on the arXiv preprint server, specifically relies on vision-language models (VLMs), which can process both images and written texts.
“Our paper was inspired by real-world challenges in automated inspection, where generating task-specific inspection routes efficiently is critical for applications like infrastructure monitoring,” Xingpeng Sun, first author of the paper, told Tech Xplore.
“While most existing approaches use Vision-Language Models (VLMs) for exploring unknown environments, we take a novel direction by leveraging VLMs to navigate known 3D scenes for fine-grained robot inspection planning tasks using natural language instructions.”
The key objective of this recent study by Sun and his colleagues was to develop a computational model that would enable the streamlined generation of inspection plans tailored around specific needs or missions. In addition, they wanted this model to work well without requiring further fine-tuning VLMs on large amounts of data, as most other machine learning-based generative models do.
. DOI: 10.48550/arxiv.2506.02917")
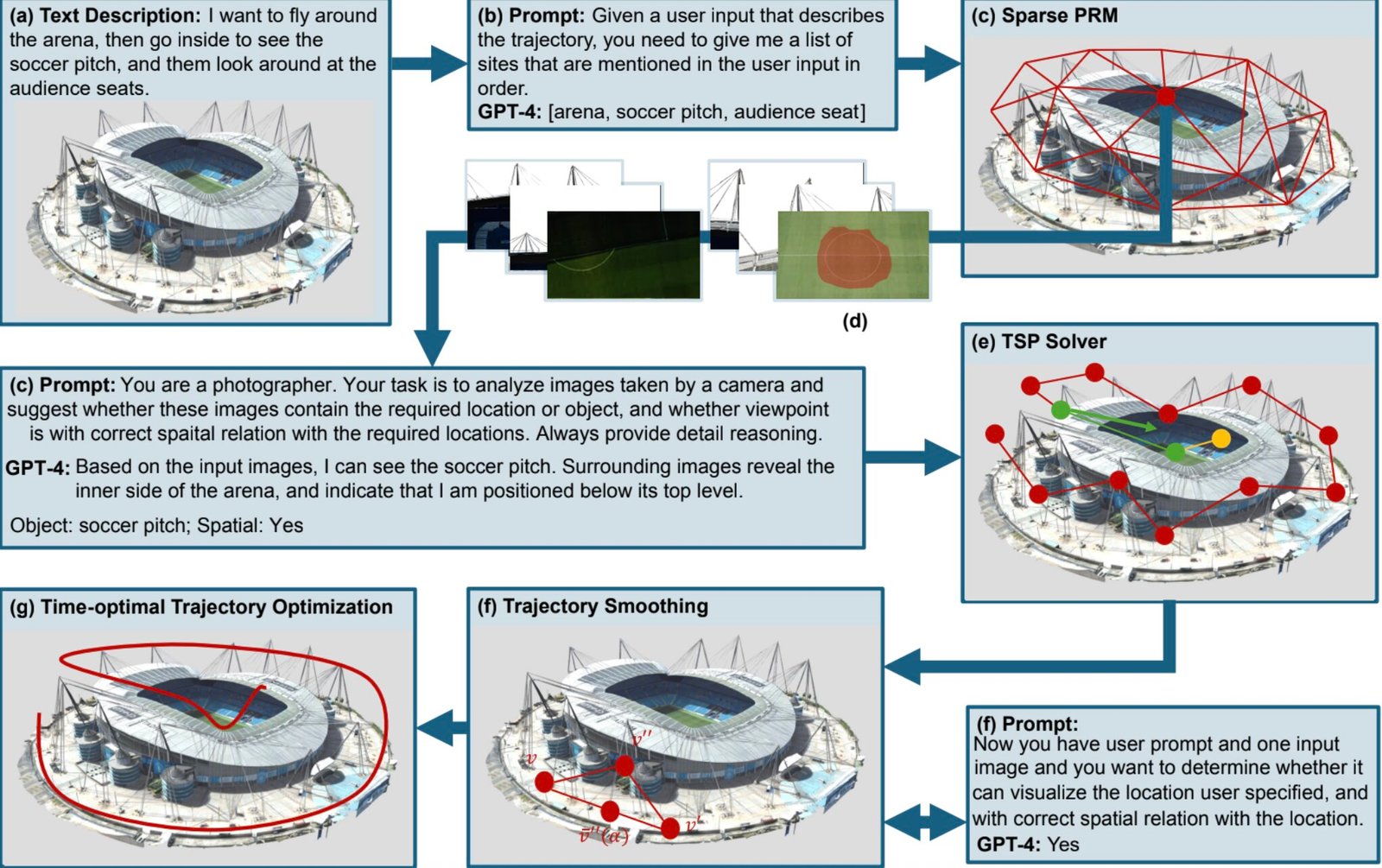
“We propose a training-free pipeline that uses a pre-trained VLM (e.g., GPT-4o) to interpret inspection targets described in natural language along with relevant images,” explained Sun.
“The model evaluates candidate viewpoints based on semantic alignment, and we further leverage GPT-4o to reason about relative spatial relationships (e.g., inside/outside the target) using multi-view imagery. An optimized 3D inspection trajectory is then generated by solving a Traveling Salesman Problem (TSP) using Mix Integer Programming that accounts for semantic relevance, spatial order, and location constraints.”
The TSP is a classical optimization problem that aims to identify the shortest possible route connecting multiple locations on a map, while also considering constraints and characteristics of an environment. After solving this problem, their model refines smooth trajectories for the robot performing an inspection and optimal camera viewpoints for capturing sites of interest.
“Our novel training-free VLM-based approach for robot inspection planning efficiently translates natural language queries into smooth, accurate 3D inspection planning trajectories for robots,” said Sun and his advisor Dr. Aniket Bera. “Our findings also reveal that state-of-the-art VLMs, such as GPT-4o, exhibit strong spatial reasoning capabilities when interpreting multi-view images.”
Sun and his colleagues evaluated their proposed inspection plan generation model in a series of tests, where they asked it to create plans for inspecting various real-world environments, feeding it images of those environments. Their findings were very promising, as the model successfully outlined smooth trajectories and optimal camera-view points for completing the desired inspections, predicting spatial relations with an accuracy of over 90%.
As part of their future studies, the researchers plan to develop and test their approach further to enhance its performance across a wide range of environments and scenarios. The model could then be assessed using real robotic systems and eventually deployed in real-world settings.
“Our next steps include extending the method to more complex 3D scenes, integrating active visual feedback to refine plans on the fly, and combining the pipeline with robot control to enable closed‑loop physical inspection deployment,” added Sun and Bera.
Written for you by our author Ingrid Fadelli,
edited by Gaby Clark
, and fact-checked and reviewed by Robert Egan —this article is the result of careful human work. We rely on readers like you to keep independent science journalism alive.
If this reporting matters to you,
please consider a donation (especially monthly).
You’ll get an ad-free account as a thank-you.
More information:
Xingpeng Sun et al, Text-guided Generation of Efficient Personalized Inspection Plans, arXiv (2025). DOI: 10.48550/arxiv.2506.02917
arXiv
© 2025 Science X Network
Citation:
Vision-language model creates plans for automated inspection of environments (2025, June 19)
retrieved 19 June 2025
from https://techxplore.com/news/2025-06-vision-language-automated-environments.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}