

. DOI: 10.48550/arxiv.2408.16125")
Ensuring that robots can smoothly collaborate with humans in real-world environments is a crucial step towards their large-scale deployment. While some robotic systems are already engaging daily with human agents, for instance at partially automated industrial and manufacturing facilities, human-robot collaboration on everyday tasks remains scarce.


Researchers at University of Padova and Mitsubishi Electric Research Laboratories (MERL) in Cambridge have developed a framework that helps to plan tasks that involve human-robot collaboration. This framework, introduced in a paper pre-published on the arXiv server, specifically focuses on tasks that entail the collaborative assembly of complex systems with various underlying components, such as pieces of furniture.
The researchers called their framework DECAF, which stands for Discrete-Event based Collaborative Human-Robot Assembly Framework for furniture. DECAF has various underlying components, including a discrete-event Markov decision process (DE-MDP) model, a HTM description of the assembly process and a Bayesian interference module.
“The human is characterized as an uncontrollable agent, implying, for example, that the agent is not bound by a pre-established sequence of actions and instead acts according to its own preferences,” Giulio Giacomuzzo, Matteo Terreran and their colleagues wrote in their paper. “Meanwhile, the task planner computes reactively the optimal actions for the collaborative robot to efficiently complete the entire assembly task in the least time possible.”
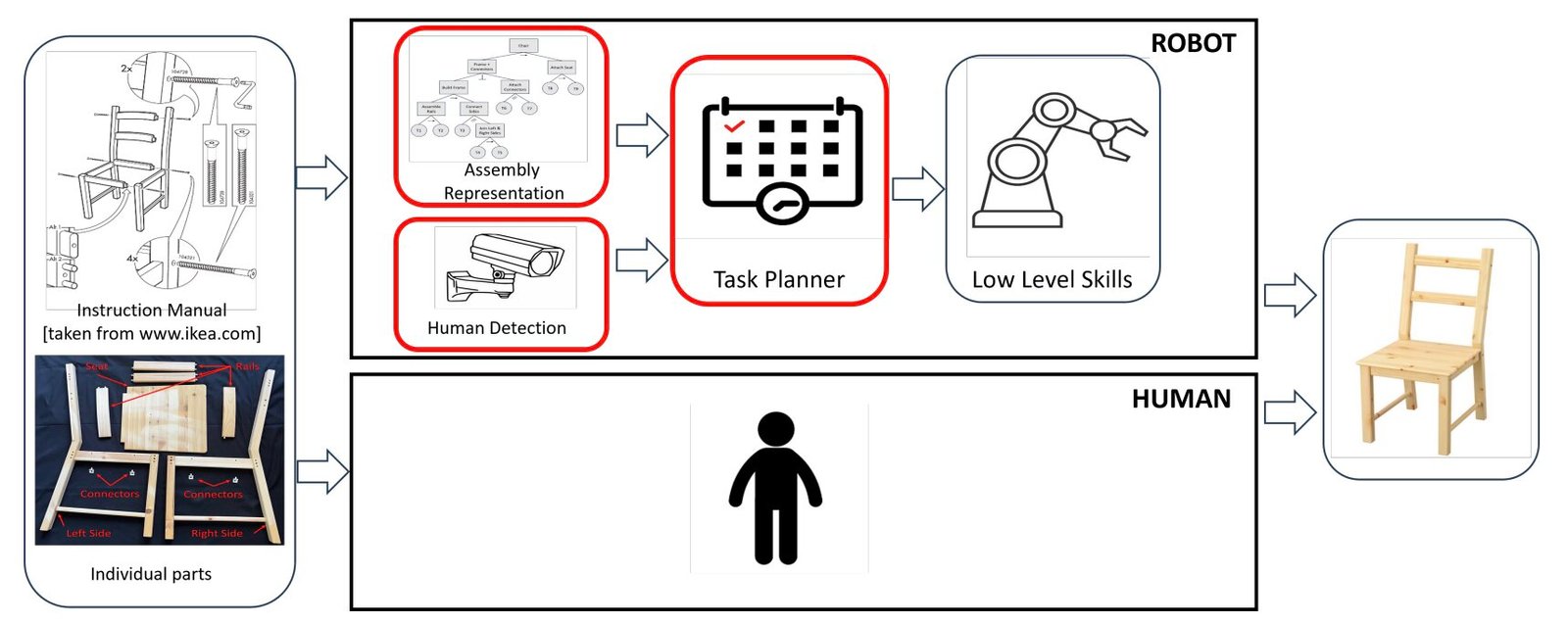
With the newly developed framework, the collaborative assembly process spans across various steps. Firstly, the robot observes the actions performed by the human agent, via a camera or other sensors.
Based on these observations, the DECAF model plans actions for the robot that would maximize the robot-human team’s efficiency in completing the assembly tasks at hand, while also adapting these actions following unpredictable events. The team modeled the assembly of furniture or other objects utilizing a mathematical framework often used to frame specific decision-making processes, known as DE-MDP.
“We formalize the problem as DE-MDP, a comprehensive framework that incorporates a variety of asynchronous behaviors, human change of mind and failure recovery as stochastic events,” wrote Giacomuzzo, Terreran and their colleagues.
“Although the problem could theoretically be addressed by constructing a graph of all possible actions, such an approach would be constrained by computational limitations. The proposed formulation offers an alternative solution utilizing Reinforcement Learning to derive an optimal policy for the robot.”
Essentially, the DE-MDP model is used to break down an assembly task and identify optimal actions that would allow the robot to efficiently tackle in collaboration with a human agent. The second component of the DECAF framework, namely the HTM model, encodes the interdependence between various sub-tasks, thus facilitating the planning process.
Finally, the team integrated a module based on a statistical approach known as Bayesian interference, which is typically used to continuously update the probability that a given hypothesis is true as more information becomes available. This module allows the framework to monitor the actions of the human agent and use them to predict the intentions of a human agent.
The researchers evaluated DECAF in a series of tests, and ran both in simulation and in a real-world setting. For the real experiment, 10 adult participants were asked to assemble a chair purchased from IKEA in collaboration with a 7-DoF robotic manipulator (i.e., the Franka Emika Panda arm).
The findings of initial tests run by the team were highly promising. In simulations, the DECAF framework was found to outperform standard planning policies, while during the real-world experiments it appeared to improve the efficiency and quality of the human-robot collaboration.
“In the future, we plan to include other optimal metrics beyond the execution time, such as human safety, action correlation and human ergonomics,” wrote the researchers.
More information:
Giulio Giacomuzzo et al, DECAF: a Discrete-Event based Collaborative Human-Robot Framework for Furniture Assembly, arXiv (2024). DOI: 10.48550/arxiv.2408.16125
arXiv
© 2024 Science X Network
Citation:
Task planning framework supports human-robot collaborative furniture assembly (2024, September 17)
retrieved 17 September 2024
from https://techxplore.com/news/2024-09-task-framework-human-robot-collaborative.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}