
. DOI: 10.1126/scirobotics.ado5888")
Imagine trying to move a heavy piece of furniture with a group of people. Everyone’s effort matters, but how do you ensure that each person is pulling their weight? This challenge of fairly distributing the load is a critical issue not only in human teamwork but also for coordinating robotic swarms.


In collective tasks, the success of the group hinges on the contribution of each member. However, identifying and rewarding individual efforts in a collective setting is no small feat. This challenge becomes even more daunting when scaled down to the micrometer level, where swarms of tiny robots must work together to perform complex tasks.
A new study published in Science Robotics, led by Clemens Bechinger from the University of Konstanz, has made significant strides in addressing this issue. The research focuses on microrobotic swarms—tiny robots propelled by laser spots—and the difficulty of assigning credit to each robot for its role in a group task. Without a fair system for doing so, some robots might slack off while others bear the burden, thus undermining the overall performance of the swarm.
To solve this, the researchers employed a machine learning algorithm together with a special method to estimate each microrobot’s contribution. This method ensures that every robot’s effort is acknowledged and optimized, preventing the “lazy agent problem” that can plague collective tasks.
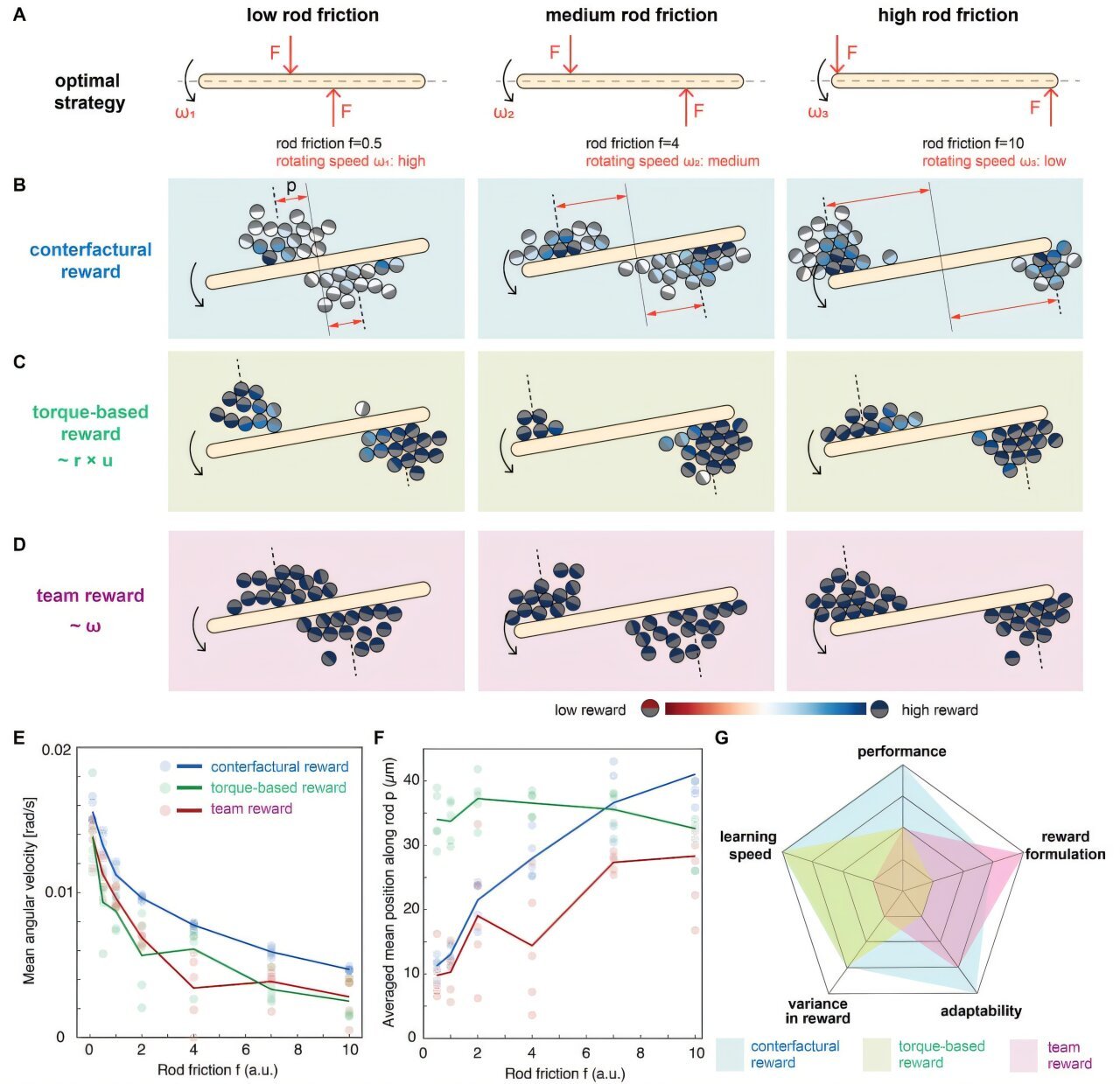
“This research was incredibly challenging because of the unpredictability at such small scales. But, by using counterfactual rewards, we were able to precisely control each microrobot’s behavior and ensure the entire swarm worked together efficiently,” said Veit-Lorenz Heuthe, doctoral researcher at the Cluster of Excellence Collective Behavior, who conducted the experiments.
These “counterfactual rewards” give each microrobot credit for its contribution and thus give the swarm indicators to learn how to make a better distribution of forces on its own.
“Our findings show that even in a swarm of tiny robots, it’s crucial to recognize and optimize individual contributions to achieve the best results,” said Bechinger, leader of the research group and principal investigator in the Cluster of Excellence Collective Behavior. “This approach not only enhances the efficiency of microrobotic swarms but also provides insights into improving teamwork in any collective system.”
This research opens up new possibilities for the use of microrobotic swarms in fields like medicine and environmental monitoring, where precise control and coordination are essential.
More information:
Veit-Lorenz Heuthe et al, Counterfactual rewards promote collective transport using individually controlled swarm microrobots, Science Robotics (2024). DOI: 10.1126/scirobotics.ado5888
University of Konstanz
Citation:
Microrobots and the ‘lazy agent problem’: Swarm study demonstrates a solution (2024, December 19)
retrieved 20 December 2024
from https://techxplore.com/news/2024-12-microrobots-lazy-agent-problem-swarm.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}