

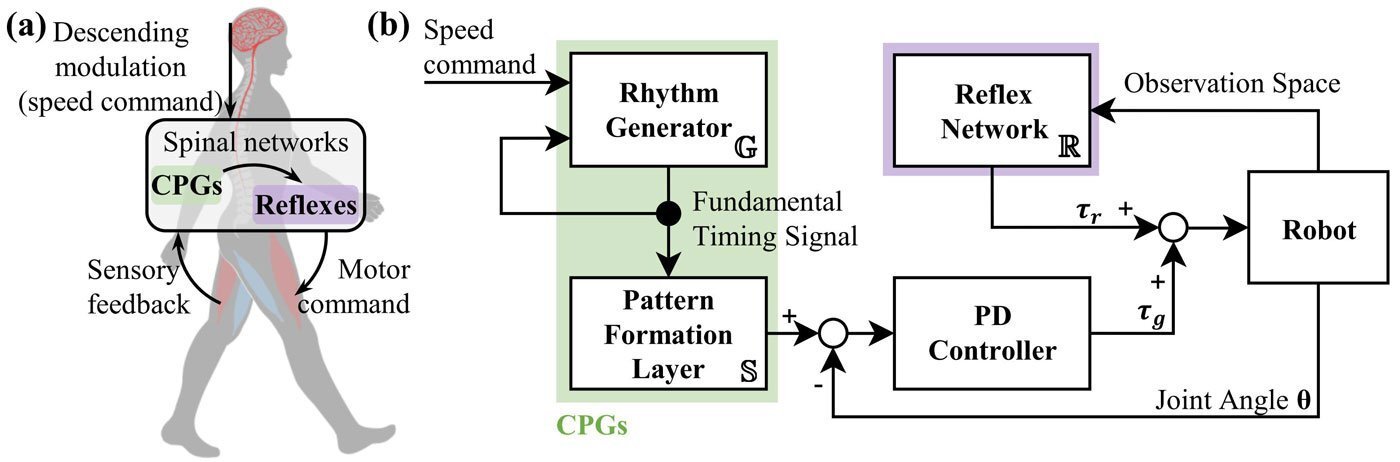
 and reflex network coordinated by speed adjustment commands from a higher-level nerve center (a), and overall control framework (b). Credit: Tohoku University")
An international group of researchers has created a new approach to imitating human motion by combining central pattern generators (CPGs) and deep reinforcement learning (DRL). The method not only imitates walking and running motions but also generates movements for frequencies where motion data is absent, enables smooth transition movements from walking to running, and allows for adaptation to environments with unstable surfaces.


Details of their breakthrough were published in the journal IEEE Robotics and Automation Letters on April 15, 2024.
We might not think about it much, but walking and running involves inherent biological redundancies that enable us to adjust to the environment or alter our walking/running speed. Given the intricacy and complexity of this, reproducing these human-like movements in robots is notoriously challenging.
Current models often struggle to accommodate unknown or challenging environments, which makes them less efficient and less effective. This is because AI is suited for generating one or a small number of correct solutions. With living organisms and their motion, there isn’t just one correct pattern to follow. There’s a whole range of possible movements, and it is not always clear which one is the best or most efficient.
DRL is one way researchers have sought to overcome this. DRL extends traditional reinforcement learning by leveraging deep neural networks to handle more complex tasks and learn directly from raw sensory inputs, enabling more flexible and powerful learning capabilities. Its disadvantage is the huge computational cost of exploring vast input space, especially when the system has a high degree of freedom.
Another approach is imitation learning, in which a robot learns by imitating motion measurement data from a human performing the same motion task. Although imitation learning is good at learning on stable environments, it struggles when faced with new situations or environments it hasn’t encountered during training. Its ability to modify and navigate effectively becomes constrained by the narrow scope of its learned behaviors.
“We overcame many of the limitations of these two approaches by combining them,” explains Mitsuhiro Hayashibe, a professor at Tohoku University’s Graduate School of Engineering. “Imitation learning was used to train a CPG-like controller, and, instead of applying deep learning to the CPGs itself, we applied it to a form of a reflex neural network that supported the CPGs.”
CPGs are neural circuits located in the spinal cord that, like a biological conductor, generate rhythmic patterns of muscle activity. In animals, a reflex circuit works in tandem with CPGs to provide adequate feedback that allows them to adjust their speed and walking/running movements to suit the terrain.
By adopting the structure of CPG and its reflexive counterpart, the adaptive imitated CPG (AI-CPG) method achieves remarkable adaptability and stability in motion generation while imitating human motion.
 Sinusoidal signals with increasing frequency were used as input to the rhythm generator of the CPG controller. (b) Center-of-gravity velocity, Froude number and flight phase ratio. The black dashed lines indicate where the gait changes. (c) Transition from walking to running. (d) Time diagram of the walking cycle. (e) Time diagram of the running cycle. Credit: Tohoku University")
“This breakthrough sets a new benchmark in generating human-like movement in robotics, with unprecedented environmental adaptation capability,” adds Hayashibe “Our method represents a significant step forward in the development of generative AI technologies for robot control, with potential applications across various industries.”
The research group comprised members from Tohoku University’s Graduate School of Engineering and the École Polytechnique Fédérale de Lausanne, or the Swiss Federal Institute of Technology in Lausanne.
More information:
Guanda Li et al, AI-CPG: Adaptive Imitated Central Pattern Generators for Bipedal Locomotion Learned Through Reinforced Reflex Neural Networks, IEEE Robotics and Automation Letters (2024). DOI: 10.1109/LRA.2024.3388842
Tohoku University
Citation:
New approach uses generative AI to imitate human motion (2024, May 8)
retrieved 8 May 2024
from https://techxplore.com/news/2024-05-approach-generative-ai-imitate-human.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}