
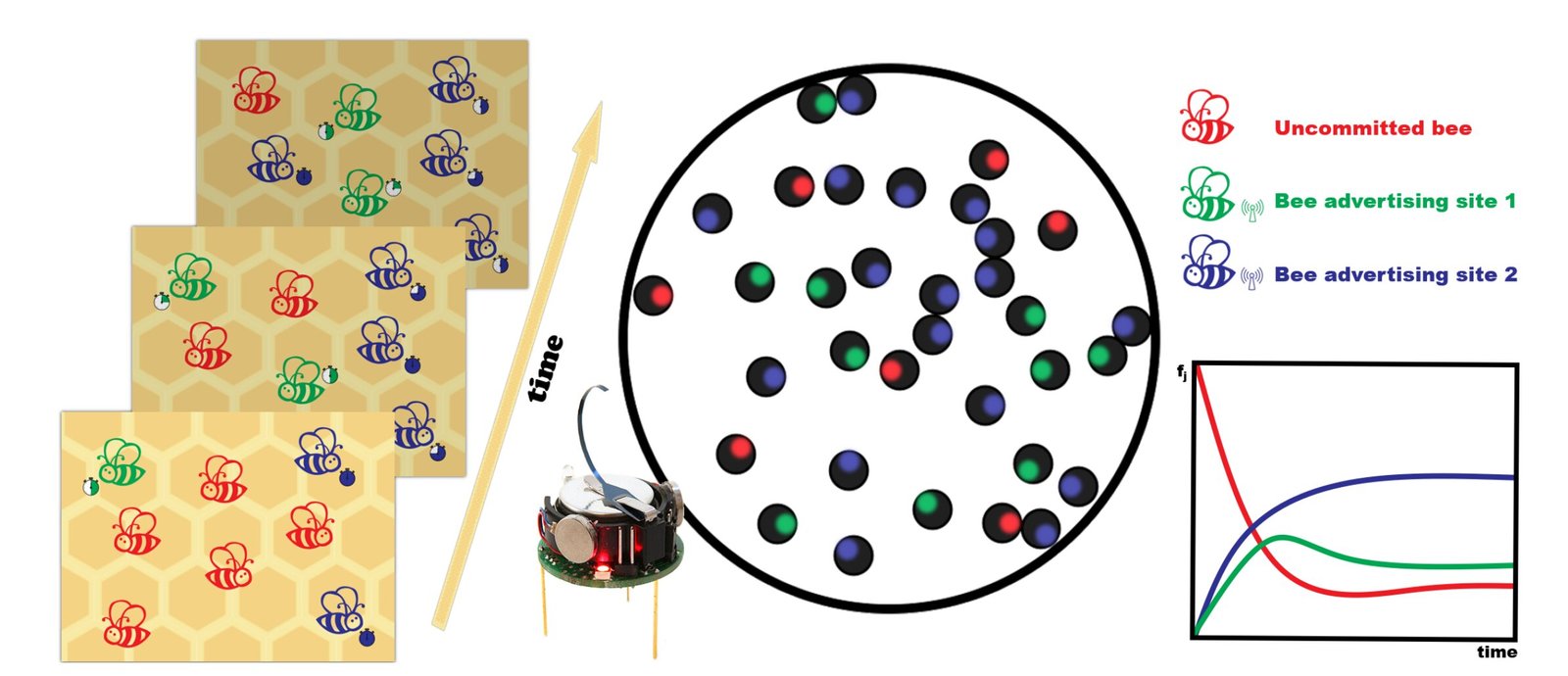
 site 1 or 2. The right column displays schematically how the different proportions of bees on each state evolve in time, starting from a totally uncommitted population. Credit: arXiv (2023). DOI: 10.48550/arxiv.2310.15592")
Researchers at the University of Barcelona have made a sweet discovery: Honeybees make great subjects when studying the dynamic of group behavior and decision-making.


In a recently released study, Professor M. Carmen Miguel, who has previously studied leadership activity among schooling fish and social interactions among flocks of birds, said a group of mini robots were trained to reach a consensus on tasks by mimicking processes displayed by bees.
The intricate behavior of bees has long been a subject of great interest among researchers. There are more than 4,000 species of the insect, and they have been around for more than 100 million years.
The Barcelona researchers designed and built an army of 35 kilobots equipped with tiny legs, LED lights, an infrared-light receiver, and dance moves somewhat less intricate than John Travolta in “Pulp Fiction” but still impressive.
They were programmed to replicate interactions among bees with skills such as light recognition and motion signals.
Each bot was tasked with finding a potential nesting location for the colony and then forging a consensus among the other bots on the optimal spot.
The bot behavior was modeled after “scout” bees, the realtors in the kingdom of Apis mellifera (honeybees) who generally are older, wiser, and knowledgeable about prime spots to build a new hive, such as in knotholes, crevices, or the eaves of a home. They also seek sources of food.
When a scout sights a potential hive site it does a “gaggle dance,” a series of rapidly swaying motions in a formation roughly resembling a figure eight.
The dance conveys the degree of desirability and certain details of the potential hive or food source. The dance signals to bees the distance and direction of the potential hive from the dance and, if related to a source of food, the type and size of that food supply.
The more desirable the site, the longer and more frequent the dance.
The researchers devised a mathematical model representing the hive location task. They then launched the 35 kilobots—each 3 centimeters wide—with instructions to convey their “opinions” about an ideal hive site to their fellow bots.
“Our experiments demonstrate that the kilobot swarm can collectively reach consensus decisions in a decentralized manner, akin to honeybees,” Miguel concluded. “These factors enable the formation of a percolated communication network, through which each robot can receive information beyond its immediate vicinity.”
Miguel said she believes the study will help lead to the development of “simple robots” that will make decisions in “a decentralized, autonomous manner.”
Such mini bots could communicate with one another while tracking disease tissue or body abnormalities from within subjects, or be dispatched in search-and rescue missions deemed to risky for humans.
“By shedding light on this crucial layer of complexity,” Miguel said, “we emphasize the significance of factors typically overlooked but essential to living systems and life itself.”
The paper, “Honeybee-like collective decision-making in a kilobot swarm,” was uploaded to the arXiv preprint server.
More information:
David March et al, Honeybee-like collective decision making in a kilobot swarm, arXiv (2023). DOI: 10.48550/arxiv.2310.15592
arXiv
© 2023 Science X Network
Citation:
Honeybee behavior as a model for decision-making in a kilobot swarm (2023, November 9)
retrieved 9 November 2023
from https://techxplore.com/news/2023-11-honeybee-behavior-decision-making-kilobot-swarm.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}