

. DOI: 10.48550/arxiv.2412.09440")
Two roboticists from the University of Leeds and University College London have developed a framework that enables robots to traverse complex terrain without extra sensors or prior rough terrain training. Joseph Humphreys and Chengxu Zhou outlined the details of their framework in a paper posted to the arXiv preprint server.


Over the past decade, programming quadruped robots has moved from hard-wiring instructions to using neural networks and the implementation of artificial networks using machine learning. In this new effort, the researchers noted that deep-learning reinforcement training has led to remarkable advances in navigational improvements in quadruped robots but that they all suffer from one constraint—they are designed to rely on a single gait strategy.
They suggest a better approach would be one that mimics the way four-legged animals typically navigate their terrain—one that allows for diverse gaits, such as running, trotting or hopping. That would allow the robot to move in a way that is most effective for a given terrain.
They note running is typically best when the terrain is reasonably uniform, whereas trotting makes more sense when moving through terrain with surprises such as differently sized pebbles or small barriers such as twigs or small bushes. Hopping is generally best when conditions are sticky.
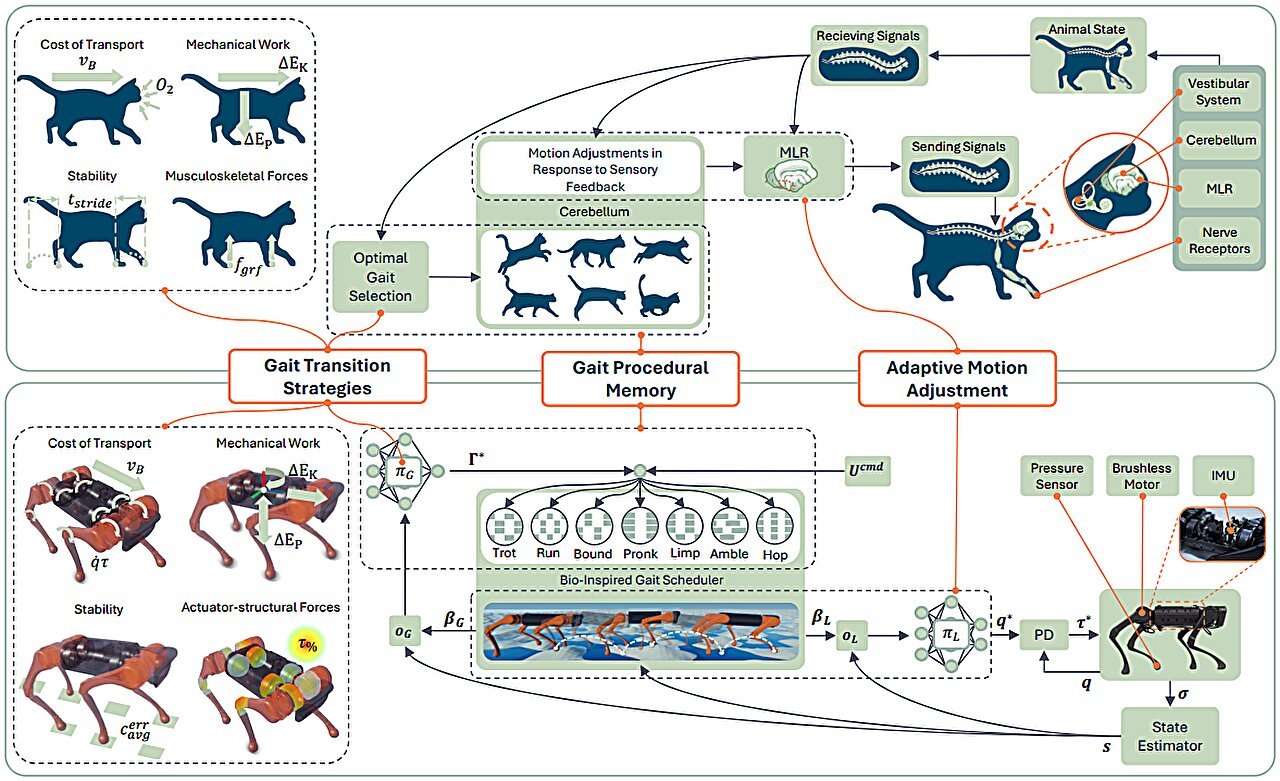
To allow a quadruped to adapt its gait to its immediate environment, the researchers came up with what they describe as a bio-inspired gait scheduler (BGS) that incorporates βL encoding in the robot’s observable space, thereby making use of pseudo-gait procedural memory and adaptive motion behavior adjustments.
This enhances adaptability by allowing the robot to change its gait depending on what environmental conditions are encountered. It also allows a robot to learn as it is released in zero-shot fashion in a variety of terrains—and without the need for extra sensors.
In testing a quadruped imbued with their new framework, they found it capable of traversing a wild variety of terrains—even those that changed very quickly—with great skill. They suggest robots with their framework would be better suited for unpredictable, real-world deployments.
More information:
Joseph Humphreys et al, Learning to Adapt: Bio-Inspired Gait Strategies for Versatile Quadruped Locomotion, arXiv (2024). DOI: 10.48550/arxiv.2412.09440
arXiv
© 2024 Science X Network
Citation:
Zero-shot strategy enables robots to traverse complex environments without extra sensors or rough terrain training (2024, December 16)
retrieved 16 December 2024
from https://techxplore.com/news/2024-12-shot-strategy-enables-robots-traverse.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






{kind=link}